The components are beneficial to understand the application of industrial robots, which can substitute for repetitive mechanical operation work, are efficient, and are a machinery that relies on its own power and control ability to achieve various functions!
The industrial robot is generally used in industrial manufacturing, automobile manufacturing, electrical appliances, food, etc. It can instead of repetitive mechanically operated work, is highly efficient, and is a machine that relies on its own power and control ability to achieve various functions. It can accept human command or operate according to a pre-programmed program. We now introduce the main components of industrial robots.
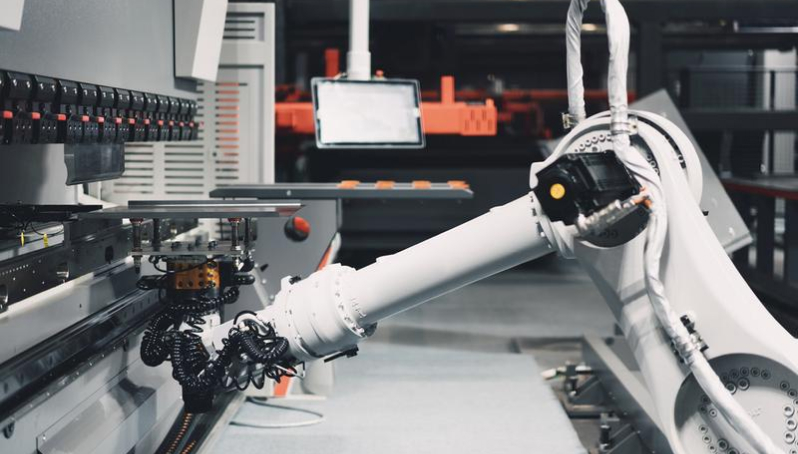
1、Body
The body is the base and actuator, including the arm, wrist and hand, and some robots have traveling mechanisms. Industrial robots have 6 degrees of freedom or even more, with usually 1 to 3 degrees of freedom of movement in the wrist; the drive system includes the power unit and transmission mechanism to make the actuators produce the corresponding action; the control system is to issue command signals to the drive system and actuators according to the input program, and to control them.
2、Drive system
The drive system of industrial robots is divided into three categories: hydraulic, pneumatic and electric according to the power source. According to the requirements of the three fundamental types can also be combined into a composite drive system. These three kinds of basic drive systems have their own features. At present, the mainstream is the electric drive system.
Due to the low inertia, large torque AC and DC servo motor and its supporting servo drive (AC inverter, DC pulse width modulator) is widely used. These systems do not need energy conversion, easy to use, flexible control. Most motors require a precision transmission mechanism to be installed behind them: a gearbox.
Its use of gear speed converter, the number of motor revolutions to decelerate to the desired number of revolutions, and get a larger torque device, thereby reducing the speed and increasing the torque,When a higher load, a single-minded increase in the power of the servo motor is very cost-effective, you can improve the appropriate speed range through the reducer to increase the output torque.
In addition, servo motors are susceptible to heat and low-frequency vibration under the low-frequency operation, and the long and repetitive work is not conducive to ensuring its accurate and reliable operation. The presence of precision gearmotors allows servo motors to operate at a suitable speed, increasing the rigidity of the mechanical body while outputting a larger torque. There are two mainstream types of gearboxes now: harmonic gearboxes and RV gearboxes.


- Home
- HI-MACH
-
Automatic Welding Machine
- Instrument Series
- ETR- TX A/400 HI・PULSEFully Automatic Water Divider Welding Machine
- ETR- TX M/400 HI・PULSEManual Water Divider Welding Machine
- HI-MACH 06SAutomatic Welding Machine for small tubes and joints
- HI-ARC 15C SERIESCurved tube automatic welding machine
- ACU-ARC 12/32VDiaphragm Automatic Welding Machine
- ACU-ARC 16/32LPipe/Flange Automatic Welding Machine
- ACU-ARC 16/32RIntersection line automatic welding machine
- ROBUST-ARC/BCutting and welding machine

- Bellows Series
- CUT 25/40Fully automatic cutting machine
- HI-CUT 05/35Corrugated Pipe Welding Joint Flattening Machine
- ROBUST-ARC 06/35Bellows pipe mouth welding machine
- CUT 10/45HDiaphragm Stamping Press
- MIRCO-ARC 06/30HInternal Circular Welding Macjine
- MIRCO-ARC 15/30L Outer Circle Welding Machine
- ROBUST 06/15 Welding joint forming machine
- ACU-ARC 06/15CHose welding machine

- Solutions
- Application
- Service
- Information
- Contact